Hello Kerbalnauts,
This blog has been started to help show the progress of a Kerbal Space Program custom controller. It is also a place where people can ask questions and make suggestions for the current and possible future builds.
We will try and answer every question to the best of our knowledge, and hopefully help you with your future Kerbal builds/missions.
If you have any specific questions on the controller or Kerbal in general, one can private message us and we will get back to you as soon as possible.
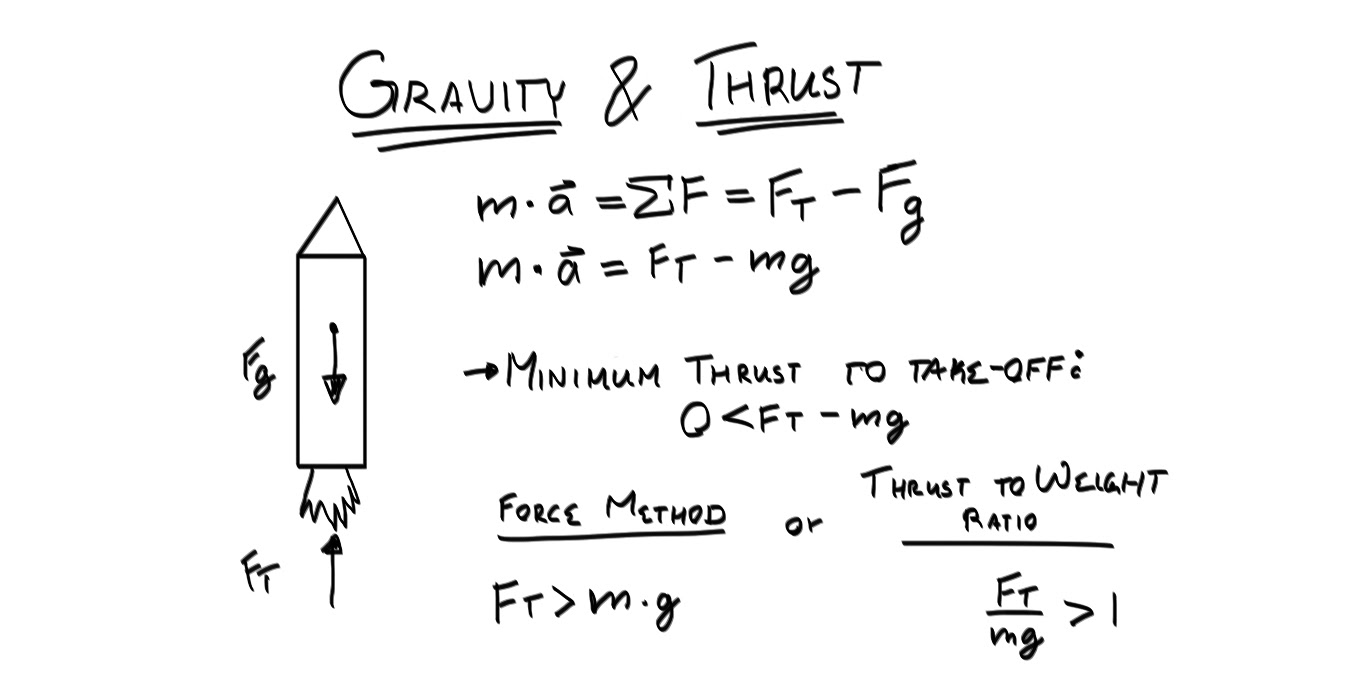
We will even help with the calculations and algorithms used for the mission control(see below).
Background:
-Me and my friend are both Mechanical Engineering students.
-He will be handling a majority of the physical building of the box and solid modeling.
-I will be handling alot of the computer coding, optimizing, and electrical work
Goals:
-To have a fully functioning Kerbal Controller which can be used instead of the traditional mouse and keyboard.
-To produce a functioning Mission Control to guide the Kerbalnauts (people controlling the vessel) to their required destination by making tools available to simplify the process of "doing rocket science"
-To make Kerbal Space Program an even more emersive experience and provide a solution to the lack of a multiplayer experience.
Hardware:
-Arduino: world famous open source microcontroller.
-Arduino Clones: a copy of above.
Software:
-GNU Octave/MatLab: to do a majority of the heavy lifting and communicating with the arduino.
-Arduino UI: to upload our custom programing to the arduino.
Mods:
-Telemachus: will be used to send out the data from the kerbal game to a retrievable format.
P.S. At the time of writing this we have already made some progress on the designing and as such multiple posts may appear in a very short amount of time. This is not to be taken as a rate at which work is being completed.